Ñ”¡¶∂®Œª¥¨–Ë“™œµΩyºØ≥…∑Ω∞∏
2012-01-09 08:25:46
ÅÌ‘¥£∫á¯ÎH¥¨≤∞æW
æéðã£∫
á¯ÎH¥¨≤∞æW
Œ“”–‘í“™’f


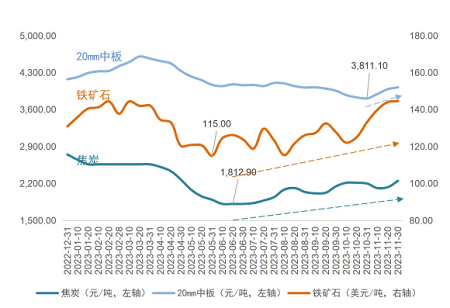
‘⁄þ^»•µƒ10-15ƒÍ¿Ô£¨∫£—Ûπ§≥à –àˆå¶”⁄∏˜∑N¥¨≤∞µƒ–¬Ω®¥¨–Ë«Û√˜Ô@‘ˆº”£¨∆‰÷–”–œýÆ≤ø∑÷¥¨≤∞≤…”√»´Î䡶∑Ω∞∏°£
∆≥ı£¨»´Î䡶¥¨≤∞◊‘Ωo‘O”ã’þ∫Õ¥¨≤∞Ω®‘Ï’þéßÅ̵ƒ÷±”^∫√Ãé «‘Oljø…“‘ÎS“‚≤º÷√°£Õ∆¡¶∆˜ôC–µ∫Õ¬ð–˝ò™‘O”ã◊ɵ√∏¸∫ÜÜŒ£ª≤ª‘Ÿ–Ë“™˝XðÜœ‰°¢Îx∫œ∆˜œµΩy∫ÕÈLµƒðSœµ£ª«“»´â€∆⁄æS◊oŸM”√“≤úp…Ÿ¡À°£»´Î䡶¥¨≤∞éßÅ̵ƒþM“ª≤Ω∫√Ãé «–߬ ÷∏þ°¢¬ð–˝ò™‘άïΩµµÕ°¢–‘ƒÐ∏ƒ…∆∫Õø…øø–‘÷…˝£¨≈c¥ÀÕ¨ïrþÄòÀ…œ¡À»´ ¿ΩÁ∏˜’˛∏Æ≤øÈTÀ˘–˵ƒæG…´”°”õ°£
òã≥…»´Î䡶∑Ω∞∏µƒÀ˘”–ΩMº˛ø…±ªÉûªØ≥…»Á“ªÇÄ’˚ÛwœµΩyƒ«ò”’˝¥_µÿπ§◊˜°£þ@∑NÉûªØµƒÍPÊI «œµΩyºØ≥…“‘º∞å¶øÕëÙµƒ–Ë«Û∫Õ–Ë“™’∆øÿœµΩyµƒƒƒ–©≤ø∑÷“‘ùM◊„þ@–©–Ë«Û”–∫Ð∫√µƒ¿ÌΩ‚°£øºë]µΩÑ”¡¶œµΩyµƒæ÷œÞ–‘£¨‘⁄lÀ“¥¨…œºØ≥…∂ý÷ÿ◊ÉÓlœµΩy”–∑«≥£¥Ûµƒ∫√Ãé°£þ@Æ”–ø…ƒÐÕ®þ^ÉûªØøÿ÷∆œµΩy“‘µ√µΩ◊ÉÓlœµΩyµƒ◊Óº—–‘ƒÐ∂¯üoìp”⁄Ñ”¡¶œµΩy‘⁄À˘”–þ\––π§õrœ¬µƒ–‘ƒÐ°£
÷T»Á∫Ω––∫ÕÑ”¡¶∂®Œª≤Ÿ◊˜þ@–©≤ªÕ¨µƒþ\––π§õrå¶◊ÉÓl°¢Ñ”¡¶∫Õøÿ÷∆œµΩyµƒÌëë™”–∑«≥£≤ªÕ¨µƒ“™«Û°£÷ªπ¬¡¢µÿå¶þ@–©œµΩy÷–µƒ“ªÇÄœµΩyþM––◊Óº—Ìë뙑O÷√£®∞≤»´ π”√£©æÕ“‚Œ∂÷¯∆‰À¸œµΩy”–ø…ƒÐ≤ªƒÐÕÍ»´∞lì]◊˜”√£¨¥¨≤∞–‘ƒÐ≤ªƒÐþ_µΩÓA∆⁄°£À˘”–œµΩy£®øÿ÷∆°¢Ñ”¡¶∫Õ◊ÉÓlœµΩy£©–Ë“™“ª∆Öf◊˜≤≈ƒÐ´@µ√–‘ƒÐ◊Óº—ªØ∫ÕøÇÛw∞≤»´–‘ƒÐ∏ƒ…∆µƒ◊ÓÉû∑Ω∞∏°£
œµΩyºØ≥…–Ë“™¥¨ñ|°¢¥¨≤∞Ω®‘Ï’þ°¢‘O”ã’þ∫Õ÷∆‘υÃГ‚◊RµΩæo√еƒÖf◊˜ÍPœµ «◊Óª˘±æµƒ°£èƒ‘O”ãÎA∂ŒÈ_ ºµΩ∫£‘áÌóƒøÕÍ≥…µƒ’˚ÇÄþ^≥Ã÷–∂º–Ë“™þ@∑Næo√еƒÖf◊˜ÍPœµ£¨∏˜∑Ω∂º”–’˝¥_µƒ∂®Œª°£
Æî–Ë“™þ_≥…≥…±æƒøòÀ∫Õ“ª∂®µƒ–‘ƒÐÉûªØÀÆ∆Ωïr£¨¥¨≤∞Óê–Õå¶Ér∏Ò «√Ù∏–µƒ°£¥Û–Õ¥¨≤∞é◊∫ı∂º⁄֜ڔ⁄Îä¡¶Ω‚õQ∑Ω∞∏£¨∂¯ð^–°µƒπ©ë™¥¨Ñt≈¨¡¶’ì◊C∆‰≥…±æ «∑Ò∫œþm°£ ¿ΩÁ’˝‘⁄æè¬˝µÿ’J◊R»´Î䡶œµΩy«“¨F‘⁄È_ º“‚◊RµΩÀ¸Çɵƒùì‘⁄“ÊÃé°£
≤ªÕ¨µƒ¿˚“Ê∑Ω”–÷¯≤ªÕ¨µƒƒøòÀ°£¥¨ñ|–Ë“™“ª∑N∏þ–ߟM±»∫ÕæG…´µƒΩ‚õQ∑Ω∞∏“‘µÕµƒþ\––∫ÕæS◊o≥…±æùM◊„À˚Çɵƒª˘±æ–Ë«Û£¨Õ¨ïr”÷“™æþ”–ë™å¶Œ¥ÅÌ–Ë«ÛµƒÏ`ªÓ–‘°£¥¨≤∞‘O”ã’þ∫ÕΩ®‘Ï’þÑtœ£Õ˚ πø’Èg◊ӥ۪ؓ‘÷…˝ðdÿõ»ð¡ø£¨ π÷ÿ¡ø◊Ó–°ªØ“‘∏ƒ…∆º◊∞Âÿì∫…°£
π©ë™…ÜΓ™“‘∑«≥£æþ”–∏ÇÝ顶µƒÉr∏Ò÷π©ƒÐÉHùM◊„ª˘±æ“™«ÛµƒœµΩyªÚœµΩyµƒ¡„º˛°£∫Ωþ\òI’þÑt“™«ÛœµΩyƒÐùM◊„èƒ∫Ω––µΩÃÿ ‚þ\ÝIµƒÀ˘”–þ\ÝI–Ë«Û£¨∂¯¥¨ºâ…ÁÑt≤ªîý墓é∑∂ë™”√”⁄–¬Ω®¥¨≤¢È_∞l–¬“é∑∂“‘ùM◊„◊ɪØ÷–µƒ –àˆΩª“◊∆Ω≈_°£
Ñ”¡¶∂®Œª¥¨≤∞Ωõ≥£≤…”√∏˜∑N∏˜ò”µƒÕ∆¡¶∆˜£Æ∂¯«“‘⁄“‘Õ˘µƒ10∂ýƒÍ¿Ô∆‰‘O”ã∏ƒ◊ÉòO…Ÿ°£œ¬ ˆ «“ª–©ø…”√µƒ–Õ Ω£∫
£™Ç»œÚÕ∆¡¶∆˜—b÷√ªÚÀ̵¿Õ∆¡¶∆˜“ª“ª¥Û≤ø∑÷À̵¿Õ∆¡¶∆˜≤…”√ø…’{¬ðæý£¨µ´º¥ π «þ@–©—b÷√“≤¬˝¬˝µÿ⁄֜ڔ⁄Îä¡¶Ω‚õQ∑Ω∞∏£ª
£™éß”–Õ∆¡¶∑˘∂»∫Õ∑ΩœÚøÿ÷∆µƒ∑ΩŒª£®ø…–˝ÞD£©Õ∆¡¶—b÷√°™°™¥Û≤ø∑÷∑ΩŒªÕ∆¡¶∆˜—b÷√‘⁄Õ∆¡¶∫Õ∑ΩœÚøÿ÷∆…œ÷˜“™ «”…Î䡶◊ÉÓl∑Ω∞∏÷π©Ñ”¡¶£ª
£™áäÀÆÕ∆þM∆˜£®¿˝»Áˆw–ŒáäÀÆ—b÷√£©°™°™ π”√Î䡶◊ÉÓlºº–g£®ˆw–ŒáäÀÆÕ∆þM∆˜∞≤—b‘⁄¥¨ÛwÉ»«“”–“ªÇÄþMÀÆÈ_ø⁄∫Õ“ªÇÄÕ®þ^åߜڻ~ðܵƒá䡘ø⁄°£ÀÆ¡˜”…◊ÉÀŸ◊ÉÓlœµΩyøÿ÷∆£©£ª
£™∆Ω–˝¬ð–˝ò™°™°™ π”√Î䡶◊ÉÓlºº–g°£
¥Û≤ø∑÷ –àˆÖ¢≈c’þ“—≥…π¶∞≤—b¡À∑˚∫œøÕëÙ∆⁄Õ˚µƒÑì–¬∑Ω∞∏£¨«“ÎS÷¯√øÃÏ”––¬µƒΩ‚õQ∑Ω∞∏þM»Î –àˆ£¨ºº–g‘⁄≥÷¿m—ðþM°£‘⁄þ^»•µƒ10∂ýƒÍ¿Ô£¨◊ÉÓl∆˜‘O”ã“—Ωõöv¡À»Ù∏…ÇÄ∞ʱ氣
”–œýÆîÈLµƒ“ª∂ŒïrÈg£¨“ª∑Néß”–◊ÉÓl◊Éâ∫∆˜µƒ∂˛òOπЫ∞∂À—b÷√‘¯◊˜ûÈπ§òIòÀú «“»‘‘⁄÷–â∫∫Õ∏þâ∫Ω‚õQ∑Ω∞∏÷–ë™”√°£ì˛¥¨≤∞‘O”ã’þ∫Õ¥¨ñ|µƒ”^¸c£¨∆‰÷˜“™»±¸c «◊ÉÓl◊Éâ∫∆˜–Ë“™Ó~Õ‚µƒø’Èg≤¢ï˛Æa…˙∏þÎä∆Ωµƒ÷C≤®∏…î_£¨À˘“‘‘⁄–°–Õ∆Ω≈_π©ë™¥¨°¢Ω¸∫£π©ë™¥¨∫Õ»˝”√π§◊˜¥¨…œµƒþm”√–‘”–œÞ°£å¶”⁄ð^¥Ûµƒ¥¨≤∞£¨÷–â∫∫Õ∏þâ∫µƒ∂˛òOπЫ∞∂À—b÷√»‘ «Éûœ»þxìÒ∑Ω∞∏°£èƒÎäâ∫∑∂á˙ÅÌ’f£¨∏þâ∫“ª∞„ûÈ6.6-11kV£¨÷˜“™”√”⁄¥Û–Õ„@æƣ؅˙Æa–Õ¥¨≤∞£ª÷–â∫ûÈ3.3kV£¨÷˜“™”√”⁄¥Û÷––Õ¥¨≤∞…œ£ª∂¯µÕâ∫“ª∞„ûÈ690V£¨”√”⁄Ω¸∫£π©ë™¥¨°£‘⁄–°–Õ¥¨≤∞…œ£¨Î䡶◊ÉÓlœµΩy∫ÐÎy±»µ√þ^≥£”√µƒø…’{¬ðæý¬ð–˝ò™∑Ω∞∏£¨“≤ÎyùM◊„¥¨ºâ…Áµƒ÷C≤®ª˚◊É“é∑∂°£þ@–©œµΩyµƒ≥…±æ°¢≥þ¥Á∫Õ÷ÿ¡ø‘⁄–°–Õ¥¨≤∞…œ≤ªþm”√°£
≤ª–Ë“™◊ÉÓl◊Éâ∫∆˜µƒ”–‘¥«∞∂À∑Ω∞∏ «“ª∑N”√”⁄ÔL¡¶∞lÎäÓI”Úµƒ≥… Ϻº–g£¨‘⁄‘ìÓI”Ú–Ë“™—b÷√”–ƒÐ¡¶‘Ÿ…˙ƒÐ‘¥∑¥ÅªÿÎäæW°£‘ì∑Ω∞∏”√»´ø…øÿ◊ÉÓlòÚÃÊ¥˙∂˛òOπÐ’˚¡˜òÚ£¨ÓêÀ∆”⁄ƒÊ◊É’˚¡˜òÚ°£‘ì∑Ω∞∏¨F‘⁄ø…“‘”√”⁄µÕâ∫Îä‘¥…˙≥…—b÷√£¨∏¸þm”√”⁄∆Ω≈_π©ë™¥¨°¢Ω¸∫£π©ë™¥¨°¢»˝”√π§◊˜¥¨∫Õ∆‰À¸–°–Õ¥¨≤∞°£
‘ì∑Ω∞∏µƒÉû¸c «õ]”–◊ÉÓl◊Éâ∫∆˜£¨ø…”√”⁄µÕâ∫Îäö‚—b÷√£¨«“÷ª”–òO–°µƒ÷C≤®∏…î_£¨”–ð^èäµƒπ ’œ◊RÑe∫Õ∏ÙÎxƒÐ¡¶£¨“‘º∞ð^–°µƒ≥þ¥Á∫Õð^ðpµƒ÷ÿ¡ø°£»±¸c∞¸¿®∏þπ ’œÎ䡘“‘º∞å¶≤¢¬ì∞lÎäôCµƒîµ¡ø”–þ\––œÞ÷∆£¨“‘úp…Ÿ◊Ó¥Ûπ ’œÎ䡘°£
éß”–Îp”–‘¥«∞∂À—b÷√µƒΩ‚õQ∑Ω∞∏ «√ø≈_Õ∆¡¶∆˜”…“ª≈_éß”–2ÇÄ£®ªÚ∏¸∂ý£©Îä‘¥ƒ£âKµƒ”–‘¥«∞∂À—b÷√◊ÉÓl∆˜Ã·π©Ñ”¡¶°£þ@–©Îä‘¥ƒ£âK”…≤ªÕ¨ÖR¡˜≈≈π©Îä°£‘ì∑Ω∞∏µƒÉû¸c «‘⁄ÖR¡˜≈≈π ’œïrÕ∆¡¶∆˜»‘ø…þ\––£¨∂¯«“ü·¡¶÷C≤®ª˚◊ɱ£≥÷òO–°°£‘⁄’˝≥£«Èõr∫Õπ ’œ«Èõrœ¬£¨æþ”–ø…úp…ŸÕ∆¡¶∫ÕÎä‘¥…˙≥…«“≤ªï˛ìp ߥ¨≤∞µƒƒÐ¡¶µƒÉûÑð£¨∂¯«“ø…þxìÒþM“ª≤ΩÉûªØ≈‰÷√“‘úp…Ÿ≥…±æ°¢≥þ¥Á∫Õ÷ÿ¡ø°£
Îä‘¥œµΩy∞¸∫¨œ¬¡–÷˜“™≤øº˛£∫≤Ò”Õ∞lÑ”ôC°¢∞lÎäôC°¢÷˜≈‰Îä∆¡∫Õðo÷˙≈‰Îä∆¡°£¥ÀÕ‚£∫
£™ ≤Ò”Õ∞lÑ”ôC“™‘⁄ÉûªØÿì∫…ÀÆ∆Ωœ¬þ\––“‘úp…ŸæS◊oµƒ–Ë“™£ª
£™ ’{ÀŸ∆˜ «∞lÑ”ôCµƒª˘±æ≤øº˛°™°™Õ®þ^’{πùþM»Î∞lÑ”ôCµƒ»º”Õ¡ø£¨≤¢¬ì∞lÑ”ôC÷ÆÈgµƒkwºâÿì∫…∑÷≈‰µ√“‘åç¨F£¨«“ÎäæWµƒÓl¬ µ√“‘æS≥÷£ª
£™ ◊‘Ñ”’{â∫∆˜’{πù∞lÎäôC¿@ΩM¥≈àˆµƒ¥≈òOÎ䡘£¨∑÷≈‰üoπ¶π¶¬ £®kvar£©≤¢æS≥÷ÎäæWÎäâ∫£ª
£™ ÷˜≈‰Îä∆¡≈c∞lÎäôCœýþB≤¢Ωõþ^÷˜ªÿ¬∑îý¬∑È_ÍPœÚÎä’æ≈‰Îä°£
‘O”ã’þ–Ë“™¿ÌΩ‚þ@–©œµΩy≤øº˛º∞∆‰æ÷œÞ–‘뙑ì»Á∫Œ’˚∫œ£¨èƒ∂¯ π√øÇÄ≤øº˛∂ºƒÐ∞lì]◊˜”√∂¯”÷≤ªåß÷¬’˚ÛwœµΩyþ^ÿì∫…°£Îä‘¥œµΩyµƒ√øÇÄ≤øº˛∂ºΩõþ^÷∆‘Ï°¢ôz≤È∫Õúy‘ᣨ»ª∫Û≤≈ÀÕµΩ¥¨èS°£Îä‘¥œµΩy“™µΩ◊ÓΩK±ª∞≤—bµΩ¥¨…œ÷Æ∫Û£¨≤≈ï˛–Œ≥…’Ê’˝µƒœµΩyºØ≥…°£
¥¨ºâ…Á‘⁄¥¨…œœµΩyΩYòã…œ∞Á—ð÷ÿ“™µƒΩ«…´£¨“ÚûÈÀ˚ÇÉ÷π©¡À¥¨èS∫Õπ©ë™…Ñ⁄œµΩy‘O”ã∆⁄Èg±ÿÌöùM◊„µƒª˘±æ“é∑∂°£œµΩyΩYòã∞¸∫¨œ¬¡–÷˜“™≤øº˛£∫Îä‘¥πп̜µΩy°¢¥¨≤∞øÿ÷∆œµΩy°¢ ÷Ñ”Õ∆¡¶∆˜øÿ÷∆œµΩy°¢ÜŒ ÷±˙≤ŸøvóUøÿ÷∆œµΩy∫ÕÑ”¡¶∂®Œªøÿ÷∆œµΩy°£
œµΩyµƒèÕÎs–‘£®”–ÍP»þ”ý∂»∫Õ∞≤»´–‘£©ÎS÷¯»Îºâµƒ√ø“ª≤Ω∂¯≤ªîý‘ˆº”°£þM“ª≤Ωµƒ∏Ωº”¥¨≤∞òÀ÷æ «ûÈ¡ÀùM◊„≠hæ≥∫Õ∞≤»´“™«Û£¨”÷‘ˆº”¡ÀœµΩyµƒèÕÎs–‘°£√ø∑NœµΩyµƒþbøÿƒÐ¡¶»Áœ¬£∫
£™Îä‘¥πп̜µΩyÃ·π©“ªÇÄèƒþh≥Ã≤Ÿ◊˜≈_ ÷Ñ”ªÚ◊‘Ñ”πпÌÎä’浃þbøÿœµΩy£ª
£™¥¨≤∞øÿ÷∆œµΩyÃ·π©“ªÇÄèƒþh≥Ã≤Ÿ◊˜≈_ ÷Ñ”ªÚ◊‘Ñ”πп̥¨≤∞ðo÷˙œµΩyµƒþbøÿœµΩy£ª
£™ ÷Ñ”Õ∆¡¶∆˜øÿ÷∆œµΩyÃ·π©“ªÇÄèƒþh≥Ã≤Ÿ◊˜≈_ ÷Ñ”πпÌÕ∆¡¶∆˜∫ÕÕ∆þMœµΩyµƒþbøÿœµΩy£ª
£™™ö¡¢ÜŒ ÷±˙≤ŸøvóUøÿ÷∆œµΩyÃ·π©“ªÇÄþbøÿœµΩyÕ®þ^“ª÷ªπ´”√µƒÜŒ ÷±˙≤ŸøvóU ÷Ñ”øÿ÷∆¥¨≤∞µƒ∫ΩœÚ∫ÕŒª÷√£¨ªÚ π”√À˘þxÕ∆¡¶∆˜µƒΩM∫œ◊‘Ñ”øÿ÷∆¥¨≤∞∫ΩœÚ£ª
£™Ñ”¡¶∂®Œªøÿ÷∆œµΩyÃ·π©“ªÇÄ ÷Ñ”ªÚ◊‘Ñ”øÿ÷∆¥¨≤∞∫ΩœÚ∫ÕŒª÷√µƒþbøÿœµΩy°£œµΩy‘O”ã÷π©≤Ÿøv≈_°¢÷˜øÿ÷∆∆˜°¢Ç˜∏–∆˜∫Õ¥¨ŒªÖ¢øºœµΩyµƒ»þ”ý∂»£¨þ@–© «¥¨≤∞»Îºâ±ÿÌöùM◊„µƒ»þ”ý∂»°£
…œ ˆœµΩyø…±ª≤∑÷ûÈþ@–©∫À–ƒœµΩy£¨À˘”–þ@–©œµΩyø…”…≤ªÕ¨µƒπ©ë™…ÃÃ·π©£¨√øÇÄœµΩyø…“‘ÜŒ™ö‘O”ã∫Õúy‘á°£þ@“‚Œ∂÷¯π©ë™…Ã÷ÆÈg±ÿÌö”–¡º∫√µƒÍPœµ∫Õ嶱À¥ÀÆa∆∑µƒð^…Óµƒ¡ÀΩ‚∂»°£
”…ÜŒ“ªπ©ë™…ÃÃ·π©µƒ∫À–ƒœµΩyë™”–÷˙”⁄∫À–ƒ≤øº˛µƒºØ≥…£¨”–÷˙”⁄π≤Õ¨µƒ¿ÌΩ‚∫Õπ≤Õ¨µƒ‘O”ãƒøòÀ°£‘O”ã∫Õúy‘áë™úp…Ÿ‘⁄’{‘á°¢∫£‘á∫Õþ\––∆⁄ÈgµƒºØ≥…ÜñÓ}°£π©ë™…Ãÿìÿü∂ýÇÄœµΩyµƒÖf’{“‘ùM◊„π≤Õ¨µƒƒøòÀ°£
≤√¥ «¥¨…œµƒ÷˜“™ºØ≥…ÜñÓ}£ø◊ÉÓlœµΩy∫Õ◊ÉÓl–±¬ “ª∞„ «“¿ì˛¥¨≤∞∫Ω––π§õrœ¬≤…”√◊Ó…Ÿîµ¡øµƒ∞lÎäôCÅÌ‘O÷√µƒ°£“ª–©◊ÉÓlœµΩyø…≈cÎä‘¥œµΩy”–Ωªª•ΩÁ√Ê«“Ωo◊ÉÓl∆˜ø…Ã·π©µƒÎä‘¥π¶¬ ‘O∂®…œœÞ°£∫£‘á«∞£¨◊ÉÓl–±¬ “ª∞„≤ªï˛±ª◊ÓΩK¥_∂®°£À¸ÇÉ”–÷˙”⁄¥¨≤∞∫Ω––ïr≤…”√◊Ó…Ÿîµ¡ø∞lÎäôC£¨µ´ «Ös≤ª¿˚”⁄ÉûªØ¥¨≤∞µƒ∫ΩœÚ∫Õ∂®Œª–‘ƒÐ°£À¸ÇÉï˛åß÷¬≤ª∑Ä∂®ÜñÓ}∫Õ≤¢ πÑ”¡¶œµΩyº∞Õ∆¡¶∆˜œµΩyþ^ÿì∫…°£™ö¡¢”⁄∆‰À˚œµΩyπ§◊˜µƒ◊ÉÓlœµΩy£¨å¢åß÷¬∫ΩœÚ∫Õ∂®ŒªÜñÓ}°£
◊ÉÓlœµΩy”–»Ù∏…µƒë™º±µƒþxÌó£¨ï˛œÞ÷∆œµΩyµƒÓ~∂®π¶¬ ðî≥ˆ£¨»Á¿‰ÖsœµΩy ß–ß°¢¿@ΩMúÿ∂»∫ÕÓl¬ œýŒªƒÊÞD¨FœÛ°£þ@–©þxÌó嶱£◊o◊ÉÓlœµΩy∫ÕœýÍP‘Olj «”–∫√Ã鵃£¨µ´Ös≤ª¿˚”⁄¥¨≤∞∫Ω––º∞∫ΩœÚ∫Õ∂®Œª≤Ÿ◊˜°£
”… ÷Ñ”øÿ÷∆óUå¶◊ÉÓlœµΩy÷≥ˆ–Ë«ÛµƒÀŸ¬ «õ]”–œÞ÷∆«“ «÷±Ω”µƒ£¨“Ú∂¯◊ÉÓlœµΩy“ª∞„墱ªèä÷∆Æa…˙–±¬ ÀŸ¬ °£‘⁄æoº±«Èõrœ¬£¨≤ŸøvóU墔–◊ɪØð^¥Ûµƒ–Ë«Û£¨‘ì–Ë«Ûµƒ π”√∫¡≤ªøºë]Ñ”¡¶œµΩyµƒ≈‰÷√°£þ@–©≤ŸøvóUµƒÉû¸c «À¸ÇÉ÷π©¡À“ª∑N∫ÜÜŒµƒÀŸ∂»ΩÁ√Ê£¨∂¯þ@“‚Œ∂÷¯◊ÉÓlœµΩy±ÿÌö”–ë™å¶øÏÀŸœýŒªƒÊÞDµƒÓl¬ ±£◊o°£
»ª∂¯£¨”…”⁄ π”√¡ÀøÏÀŸ≤ŸøvóU–Ë«Û£¨“≤ø…ƒÐåß÷¬Ã¯ÎäªÚ»´√ÊîýÎäÝÓõr°£ ÷Ñ”≤ŸøvóUõ]”–Ã·π©»´√ÊîýÎä±£◊o£¨“ÚûÈÀ¸ÇÉÉHøø◊ÉÓlœµΩyµƒ≥¨Ól±£◊oÅÌ“‘∑¿»f“ª°£
≤Ò”Õ∞lÑ”ôC°¢∞lÎäôC∫Õ÷˜≈‰Îä∆¡µƒ≥ı º‘O÷√÷ª‘⁄¨FàˆÕ®þ^ π”√ÿì∫…éÏÆa…˙µƒÿì∫…þM––úy‘á°£úy‘á∆⁄Èg£¨∞lÑ”ôC∫Õ’{ÀŸ∆˜œµΩyÉH‘O÷√ÅÌë™å¶À≤◊É°¢º”ðd∫Õ–∂ðd«Èõr°£’˝¥_µƒ‘O÷√å¢Ωo≥ˆ«°ÆÌë뙣¨≤ª’˝¥_µƒ‘O÷√Ñtå¢åß÷¬’˚ÇÄœµΩyµƒ–‘ƒÐ◊É≤Ó°£µ‰–Õ«Èõr «≤ª’˝¥_‘O÷√“ªÈ_ ºæÕï˛“Ú–Ë«ÛµƒøÏÀŸ◊ɪØ∂¯±ª∞l¨F£¨◊ÉÓlœµΩyπ§≥Ãéüø…∏ƒ◊É𶬠ðî≥ˆ–±¬ ÅÌΩ‚õQÜñÓ}°£
æÕÜŒ ÷±˙≤ŸøvóU∫ÕÑ”¡¶∂®ŒªœµΩy∂¯—‘£¨‘⁄’˝≥£þ\––ïr÷ª–Ë π”√∫Ð…ŸµƒÕ∆¡¶æՃб£≥÷∫ΩœÚ∫Õ¥¨Œª°£»ª∂¯£¨À¸ÇÉ“≤ƒÐÕ®þ^ΩM∫œÜŒ ÷±˙≤ŸøvóUªÚ◊‘Ñ”øÿ÷∆ÅÌåç¨FÕ∆¡¶µƒøÏÀŸ◊ɪØ≤¢‘⁄òO∂õƒïrÈgÉ»‘Ï≥…∂ý÷ÿÖR¡˜≈≈æÞ¥ÛµƒÑ”¡¶≤®Ñ”°£þ@œý뙵ÿ“≤ƒÐ πÕ∆¡¶∆˜∫ÕÑ”¡¶œµΩyþ^ÿì∫…°£Ã·π©¡À»´√ÊîýÎä±£◊o«“œµΩyµƒ’˝¥_‘O÷√“‚Œ∂÷¯œµΩyå¢∞¥’’‘O”ãþ\––£¨µ´≤ª’˝¥_µƒ‘O÷√å¢åß÷¬œµΩy–‘ƒÐ◊É‘„£¨ø…ƒÐ≥ˆ¨F»´√ÊîýÎäÝÓõr°£
ΩM∫œÕ∆¡¶øÿ÷∆å¶Ñ”¡¶œµΩy≤¢õ]”–∑«≥£¥Ûµƒ≥ˆÂe»ð‘S∂»£¨“ÚûÈÀ¸å¢“¿’’‘O”ãπ§◊˜‘S∂ýƒÍ°£Ñ”¡¶œµΩyø…ƒÐ‘⁄∂®∆⁄æS◊o∫Û≥ˆ¨F–‘ƒÐœ¬Ωµ«Èõr£¨∂¯–‘ƒÐœ¬Ωµø…èƒ ÷Ñ”≤ŸøvóU∫Õ◊‘Ñ”øÿ÷∆œµΩyµƒ±Ì¨F≤ªº—…œø¥≥ˆÅÌ°£
Œ“ÇÉ‘ı√¥≤≈ƒÐ“‘ð^∫√µƒ∑Ω Ω∞—þ@–©∫À–ƒœµΩy’˚∫œ‘⁄“ª∆“‘∏ƒ…∆¥¨≤∞µƒøÇÛw–‘ƒÐ∫Õ∞≤»´–‘£ø◊ÉÓlœµΩy°¢∫Ω––≤Ÿ◊˜∫ÕÃÿ ‚≤Ÿ◊˜∂º–Ë“™”–À˘∏ƒþM°£
◊ÉÓlœµΩy‘⁄ôC–µ∑Ω√Ê ÐµΩœýþBÕ∆¡¶∆˜µƒœÞ÷∆£¨∂¯‘⁄Îäö‚∑Ω√Ê ÐµΩÑ”¡¶œµΩy≈‰÷√µƒœÞ÷∆°£◊ÉÓlœµΩyë™‘ì‘ ‘S”√ëÙåç¨F◊Ó¥Û𶬠ðî≥ˆ◊ɪؖ±¬ µƒƒÐ¡¶£¨ë™‘ìƒÐ‘O÷√◊Ó¥Û◊ɪؖ±¬ «“≤ªë™‘ì ÐœýþBÎäö‚œµΩyµƒœÞ÷∆°£À¸ë™‘ì”–·òå¶Ól¬ œýŒªƒÊÞDµƒë™º±þxÌó“‘±£◊o∫Õ∑¿÷π≥¨Ól“˝∆µƒ»´√ÊîýÎ䣨∂¯«““≤뙑ìÎSïr∏Ê÷™œýþBœµΩyƒÐ”∞Ìë–‘ƒÐµƒæ÷œÞ–‘°£
æÕ ÷Ñ”≤ŸøvóUøÿ÷∆∂¯—‘£¨≤ŸøvóUµƒÑ”ëB◊ɪج 뙑ì∏˘ì˛Ñ”¡¶œµΩy‘O÷√µƒ≤ªÕ¨”√ÅÌÆa…˙◊Óº—Ìë뙣¨∂¯≤ª «”…≤Ÿ◊˜ÜT∏˘ì˛ø…”√µƒ∞lÎä¡øµƒ∂ý…Ÿå¶≤ŸøvóU≤Ÿ◊˜µƒøϪڬ˝ÅÌõQ∂®°£Æî◊ÉÓlœµΩyǘÀÕ∫ÕΩ” ’𶬠–≈œ¢ïr£¨æÕï˛Ã·π©»´√ÊîýÎä±£◊o£¨∂¯Æî◊ÉÓlœµΩy≤ªƒÐΩ” ÐµΩ»´√Ê𶬠–≈œ¢ïr£¨ÑtªÿèÕµΩœ¬Ωµ–±¬ “‘¥_±£‘⁄◊ÓâƒÝÓõrœ¬∑µªÿ‘≠ÝÓ°£
þ^»•£¨ÆΩy“™«Û∏þÕ∆¡¶ïr£¨ÜŒ ÷±˙≤ŸøvóU∫ÕÑ”¡¶∂®ŒªœµΩy≤¢≤ªƒÐ∫Ð∫√µÿ≈cÑ”¡¶œµΩy≈‰∫œ°£œµΩy¥_«–÷™µ¿ƒƒ≈_∞lÎäôC≈cƒƒÃ◊ÖR¡˜≈≈œµΩyœýþB£¨À˘“‘÷™µ¿ƒ„À˘ π”√µƒ≤Ò”Õ∞lÑ”ôCÿì∫…µƒ◊ɪج £¨ƒÐ πœµΩy‘⁄≤ªº”÷ÿ≤Ò”Õ∞lÑ”ôCÿì∫…µƒ«Èõrœ¬∏ƒ◊ÉÕ∆¡¶µƒ◊ɪج °£
‘⁄Õ∆¡¶“™«ÛµÕ«Èõrœ¬£¨À˘–ËÕ∆¡¶ƒÐ‘⁄∞lÎä—b÷√œÞ÷∆‘ ‘S∑∂á˙É»∑«≥£øÏÀŸåç¨F°£∂¯‘⁄Õ∆¡¶Ãé”⁄’˝≥£ÀÆ∆Ωµƒ«Èõrïr£¨þ@å¢∏ƒ…∆Õ∆¡¶∆˜µƒÌëë™ÀŸ∂»°£‘⁄Õ∆¡¶“™«Û∏þµƒ«Èõrœ¬£¨À˘–ËÕ∆¡¶ƒÐ‘⁄∞lÎä—b÷√œÞ÷∆‘ ‘S∑∂á˙É»“‘œýå¶æè¬˝ÀŸ∂»åç¨F°£∂¯‘⁄Õ∆¡¶Ãé”⁄’˝≥££Ø÷–µ»ÀÆ∆Ωµƒõrœ¬£¨þ@å¢∏ƒ…∆Õ∆¡¶∆˜µƒÌëë™ÀŸ∂»≤¢‘⁄Ñ”¡¶œµΩyþÖΩÁ∑∂á˙É»åç¨Fð^∆Ωª¨µƒπ¶¬ ◊ɪذ£
‘⁄𶬠œ˚∫ƒð^¥Ûµƒ«Èõrœ¬£¨Õ∆¡¶ƒÐ‘⁄∞lÎä—b÷√œÞ÷∆‘ ‘S∑∂á˙É»“‘ƒ≥ÇÄÀŸ∂»”√°£þ@墑 ‘Søÿ÷∆ ÷∂ŒƒÐ±ª∏¸∫√µÿ’∆øÿ°£
‘⁄ÜŒÇÄπ©ë™…Ãπ©ë™Æa∆∑µƒ«Èõrœ¬£¨“™ πÀ˘”–π©ë™…Ã≤Ω’{“ª÷¬∫пßÎy°£œÎ“™þ_◊Ó”––ßµƒ‘Olj’˚∫œ£¨æÕ뙑쓑‘⁄ƒ≥–©∑Ω√Êþ_µΩ◊Ó∏þµƒ’˚∫œÀÆ∆Ω◊˜ûÈ◊Ó–°“™«Û°£
÷Ñ”øÿ÷∆°¢ÜŒ ÷±˙≤ŸøvóUøÿ÷∆°¢Ñ”¡¶∂®Œª∫Õ◊ÉÓlœµΩy–Ë“™“ªÇÄ√˜¥_µƒ≥–÷Z£¨æÕ «‘⁄Ñ”¡¶ π”√°¢∫ΩœÚ∫Õ∂®Œªøÿ÷∆∏ƒþM∑Ω√ÊΩo≥ˆÉûªØ∑Ω∞∏∞lì]◊Óº—–‘ƒÐ°£þ@å¢òO¥Û∏ƒ…∆¥¨≤∞µƒ∞≤»´–‘≤¢úp…Ÿ∞lÑ”ôCµƒÿìì˙∫Õ»´√ÊîýÎä«Èõrµƒ∞l…˙°£
þ@∑Nπ¶ƒÐ–‘∫ÕºØ≥…ªØµƒ π”√∑«≥£þm”⁄◊ÉÓlœµΩy£¨∂¯ª˘”⁄∞lÎäƒÐ¡¶µƒÕ∆¡¶◊ɪج ’∆øÿ¿ÌƒÓ“≤ø…ë™”√”⁄¬ðæýøÿ÷∆œµΩy°£Õ∆¡¶∆˜÷∆‘Ï…Ã墖˓™øºë]𶬠ðî≥ˆ◊ɪج ‘⁄ ÷Ñ”≤ŸøvóU°¢ÜŒ ÷±˙≤ŸøvóUøÿ÷∆∫ÕÑ”¡¶∂®ŒªœµΩy÷–µƒë™”√–ßπ˚°£”–¡À…œ ˆµƒœµΩyºØ≥…£¨Œ¥ÅÌ嶒˛∏Æ≠hæ≥ƒøòÀµƒ≥–÷Zå¢þM“ª≤Ωåß÷¬œµΩyµƒÉûªØ∫Õ’˚∫œ°£
òÀ∫û£∫ Ñ”¡¶∂®Œª¥¨ œµΩyºØ≥…

ûȃ„Õ∆À]